TUGAS PRAKTIKUM PERCOBAAN-9 "NADA'
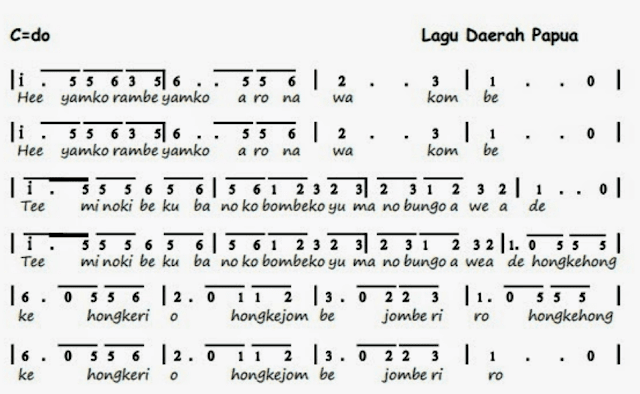
Nama Kelompok : 1. Riski Ariyanto / 163600047 2. Mufti Maulana Rahman / 163600059 Tujuan : Membuat Nada Bunyi atau Musik 1 Oktaf Dengan perbandingan frekuensi sebagai berikut : Dibaca Do(1) Re(2) Mi(3) Fa(4) Sol(5) La(6) Si(7) do(i) Perbandingan Frekuensi 24 27 30 32 36 40 45 48 Nada Dasar 1 Oktaf 264 297 330 352 396 440 495 528 Nada Atas 1 528 594 660 704 792 880 990 1056 Dengan lagu dibawa ini : Maka kita dapat membuat nada dengan Arduino dengan : Program : void setup() { pinMode(8,OUTPUT);// pin 8 sebagai output(speaker) } void loop() { noTone(8);// baris ke 1 delay(1000); tone(8,528,200);// kirim frekuensi 528 hertz ke pin 8 dengan daya 200watt delay(300);// banyak ketukan nada noTone(8); tone(8,396,200); delay(200); noTone(8)